- MathNotebook
- MathConcepts
- StudyMath
- Geometry
- Logic
- Bott periodicity
- CategoryTheory
- FieldWithOneElement
- MathDiscovery
- Math Connections
Epistemology
- m a t h 4 w i s d o m - g m a i l
- +370 607 27 665
- My work is in the Public Domain for all to share freely.
- 读物 书 影片 维基百科
Introduction E9F5FC
Questions FFFFC0
Software
Bott Periodicity for Octonion Maniacs
Investigating Bott periodicity
L4 decouples the three minds
They appear independently
The others are beyond the mirror
Time and Space as Representations of Decision-Making
The Yoneda Embedding Expresses Whether, What, How, Why
- Prepare slides for a talk about Bott periodicity that I will give to John and Thomas.
- Understand how the generators relate to the octonions. In particular, the role that the auxiliary matrices play.
- Think of the {$J_i$} in terms of 2x2 matrices of 4x4 matrices (which are quaternions but then unitary and then orthogonal).
- {$Cl_{0,6}$} has {$2^6=64$} generators and we have {$8\times 8=64$} matrix generators so they should match. Check this and study the patterns. Note that {$Cl_{0,6}\cong R(8)$}.
- Furthermore {$Cl_{0,7}\cong R(8)\oplus R(8)$} but then {$Cl_{0,8}\cong R(16)$}. Understand this.
- Note also that there are similar isomorphisms for all of the Clifford algebras but they are in terms of the complex numbers and the quaternions.
- Describe the pattern of the matrices in terms of the upper triangle as a sequence of 1s and -1s and 0s.
- Compare the {$J_i$} with the sequence of Clifford algebras and their dimensions.
Sets of Mutually Anticommuting Linear Complex Structures
Goal: Describe mutually anticommuting linear complex structures {$J_1, J_2, J_3, J_4, J_5, J_6, J_7,\cdots$}
Orthogonal matrices {$J_\alpha$} such that {$J_\alpha^2=-I$} and {$J_\alpha J_\beta =-J_\beta J_\alpha$}.
Note that if {$J_\alpha,J_\beta,J_\gamma$} are distinct, then {$(J_\alpha J_\beta)^2=-I$} but {$(J_\alpha J_\beta J_\gamma)^2=I$}.
Notation for {$2\times 2$} blocks thought of as linear (complex numbers) or antilinear
{$I_2= \begin{pmatrix} 1 & 0 \\ 0 & 1 \\ \end{pmatrix}, i_2= \begin{pmatrix} 0 & -1 \\ 1 & 0 \\ \end{pmatrix}, r_2= \begin{pmatrix} 1 & 0 \\ 0 & -1 \\ \end{pmatrix}, i_2r_2= \begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix}$}
Notation for {$4\times 4$} blocks thought of as quaternions
{$i_4= \begin{pmatrix} 0 & -1 & 0 & 0 \\ 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & -1 \\ 0 & 0 & 1 & 0 \\ \end{pmatrix}, j_4= \begin{pmatrix} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & -1 \\ -1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ \end{pmatrix}, k_4= \begin{pmatrix} 0 & 0 & 0 & 1 \\ 0 & 0 & 1 & 0 \\ 0 & -1 & 0 & 0 \\ -1 & 0 & 0 & 0 \\ \end{pmatrix}$}
{$i_4j_4=k_4,\;\; j_4k_4=i_4,\;\; k_4i_4=j_4,\;\;i^2=j^2=k^2=-1,\;\;,j_4i_4=-k_4,\;\; k_4j_4=-i_4,\;\; i_4k_4=-j_4$}
They provide a recipe for constructing mutually anticommuting linear complex structures {$J_1, J_2, J_3, J_4, J_5, J_6, J_7,\cdots$}.
{$J_1=\textrm{diag}[i_2]=\textrm{diag}[i_4]$}
{$J_2=\textrm{diag}[j_4]$}
Suppose {$J_3$} exists. Let {$K=J_1J_2J_3$}. Then {$K^2=I$} and consequently, {$K$} satisfies {$x^2-1$}, thus posseses quaternionic eigenspaces {$V_{\pm}$} where it takes values {$\pm 1$} accordingly. {$Kv_+=v_+$} for {$v_+\in V_+$} and {$Kv_-=-v_-$} for {$v_-\in V_-$}. {$K$} can be used to define {$J_3=J_2^{-1}J_1^{-1}K$}.
To define {$J_4$} we must suppose {$V_+$} and {$V_-$} have the same dimension. Suppose {$J_4$} exists. Let {$L=J_3J_4$}. Then {$LK=-KL, L^2=-I, LJ_1=J_1L, LJ_2=J_2L$}. {$L$} preserves the quaternionic structure and is a quaternionic isometry from {$V_+$} to {$V_-$}. {$L$} can be used to define {$J_4=J_3^{-1}L$}.
Suppose {$J_5$} exists. Let {$M=J_1J_4J_5$}. Then {$M^2=I$} and {$M$} commutes with {$K$} and {$J_1$}. Thus {$M$} acts within an eigenspace of {$K$} (say {$V_+$}) and divides it into two mutually orthogonal eigenspaces {$W_\pm$} with {$W_-=J_2W_+$}. {$M$} can be used to define {$J_5=J_4^{-1}J_1^{-1}M$}.
Suppose {$J_6$} exists. Let {$N=J_2J_4J_6$}. Then {$N^2=I$} and {$N$} commutes with {$K$} and {$M$}. Thus {$N$} acts within an eigenspace of {$M$} (say {$W_+$}) and divides it into two mutually orthogonal eigenspaces {$X_\pm$} with {$X_-=J_1W_+$}. {$N$} can be used to define {$J_6=J_4^{-1}J_2^{-1}N$}.
Suppose {$J_7$} exists. Let {$P=J_1J_6J_7$}. Then {$P^2=I$} and {$P$} commutes with {$K$}, {$M$} and {$N$}. Thus {$P$} acts within an eigenspace of {$X$} (say {$X_+$}) and divides it into two mutually orthogonal eigenspaces {$Y_\pm$}. {$P$} can be used to define {$J_7=J_6^{-1}J_1^{-1}P$}.
To define {$J_8$} we must suppose {$Y_+$} and {$Y_-$} have the same dimension. Suppose {$J_8$} exists. Let {$Q=J_7J_8$}. Then {$Q^2=-I$} and {$Q$} commutes with {$K$}, {$M$} and {$N$} but anticommutes with {$P$}. Thus {$Q$} is an isometry mapping {$Y_+\leftrightarrow Y_-$}. {$Q$} can be used to define {$J_8=J_7^{-1}Q$}.
Notation
{$R_2= \begin{pmatrix} 1 & \\ & -1 \end{pmatrix}, R_4= \begin{pmatrix} 1 & & & \\ & 1 & & \\ & & -1 & \\ & & & -1 \\ \end{pmatrix}, R_8=\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & -1 & & \\ & & & & & & -1 & \\ & & & & & & & -1 \\ \end{pmatrix}$}
The reflections {$R_2, R_4, R_8$} determine eigenspaces {$V_{+1}$} and {$V_{-1}$}.
A shift in perspective is given by an isometry between eigenspaces {$V_{+1}$} and {$V_{-1}$}.
{$L_2= \begin{pmatrix} & -1 \\ 1 & \end{pmatrix}, L_4= \begin{pmatrix} & & -1 & \\ & & & -1 \\ 1 & & & \\ & 1 & & \\ \end{pmatrix}, L_8=\begin{pmatrix} & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ -1 & & & & & & & \\ & -1 & & & & & & \\ & & -1 & & & & & \\ & & & -1 & & & & \\ \end{pmatrix}$}
Note that
{$\begin{pmatrix} & -1 & & \\ 1 & & & \\ & & & -1 \\ & & 1 & \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & & -1 \\ & & 1 & \\ & 1 & & \\ -1 & & & \\ \end{pmatrix}$}
{$\begin{pmatrix} 1 & & & \\ & -1 & & \\ & & 1 & \\ & & & -1 \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & 1 & \\ & & & -1 \\ -1 & & & \\ & 1 & & \\ \end{pmatrix} = j = J_2$}
{$\begin{pmatrix} & 1 & & \\ 1 & & & \\ & & & 1 \\ & & 1 & \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & & 1 \\ & & 1 & \\ & -1 & & \\ -1 & & & \\ \end{pmatrix} = k$}
Thus the {$2\times 2$} matrices {$M_l$} are mapped by {$L_4$} to an isometry that involves multiplying by {$M_l$} in one direction and {$-M_l$} in the opposite direction. -
{$J_1$}
{$J_2$}
{$J_3=D_{----++++}J_1J_2$}
{$J_4=HJ_1J_2$}
{$J_5=L_4D_{--++--++}J_2$}
{$J_6=L_4D_{-+-+-+-+}J_1$}
{$J_7=LD_{r_2-r_2-r_2r_2r_2-r_2-r_2r_2}$}
{$J_1$}
{$J_2$}
{$J_3=J_1J_2\begin{pmatrix} -1 & & & & & & & \\ & -1 & & & & & & \\ & & -1 & & & & & \\ & & & -1 & & & & \\ & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ \end{pmatrix}$}
{$J_4=LJ_1J_2\begin{pmatrix} -1 & & & & & & & \\ & -1 & & & & & & \\ & & -1 & & & & & \\ & & & -1 & & & & \\ & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ \end{pmatrix}$}
{$J_5=LJ_2\begin{pmatrix} -1 & & & & & & & \\ & -1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & -1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ \end{pmatrix}$}
{$J_6=LJ_1\begin{pmatrix} -1 & & & & & & & \\ & 1 & & & & & & \\ & & -1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & 1 & & \\ & & & & & & -1 & \\ & & & & & & & 1 \\ \end{pmatrix}$}
{$J_7=L\;\textrm{diag} \begin{bmatrix} -1 & 1 & 1 & -1 & 1 & -1 & -1 & 1 & -1 & 1 & 1 & -1 & 1 & -1 & -1 & 1 \\ \end{bmatrix}$}
xxxx
{$J_8=J_7^{-1}Q = \begin{pmatrix} & & & & ir_2 & & & \\ & & & & & -ir_2 & & \\ & & & & & & -ir_2 & \\ & & & & & & & ir_2 \\ -ir_2 & & & & & & & \\ & ir_2 & & & & & & \\ & & ir_2 & & & & & \\ & & & -ir_2 & & & & \\ \end{pmatrix}$}
Notation
{$\omega =\begin{pmatrix} 0 & -I_4 \\ I_4 & 0 \\ \end{pmatrix}$}
{$KL=-\omega =\begin{pmatrix} 0 & I_4 \\ -I_4 & 0 \\ \end{pmatrix}$}
{$J_1$}
{$J_2$}
{$J_3=J_2^{-1}J_1^{-1}K=J_2J_1K$}
{$J_4=J_3^{-1}L=K^{-1}J_1J_2L=KJ_1J_2L=(J_1J_2J_3)J_1J_2L=J_1J_2(J_1J_2J_3)L=J_1J_2KL=-J_1J_2\omega=J_2J_1\omega=J_1J_2\begin{pmatrix} 0 & 0 & I_2 & 0 \\ 0 & 0 & 0 & I_2 \\ -I_2 & 0 & 0 & 0 \\ 0 & -I_2 & 0 & 0 \\ \end{pmatrix}$}
{$J_5=J_4^{-1}J_1^{-1}M=\omega^{-1}J_1^{-1}J_2^{-1}J_1^{-1}M = \omega^{-1}J_2^{-1}M = J_2^{-1}\omega^{-1}M = J_2\begin{pmatrix} 0 & 0 & I_2 & 0 \\ 0 & 0 & 0 & -I_2 \\ I_2 & 0 & 0 & 0 \\ 0 & -I_2 & 0 & 0 \\ \end{pmatrix}$}
{$J_6=J_4^{-1}J_2^{-1}N=\omega^{-1}J_1^{-1}J_2^{-1}J_2^{-1}N=\omega^{-1}J_1^{-1}N=J_1^{-1}\omega^{-1}N=J_1\begin{pmatrix} 0 & 0 & r_2 & 0 \\ 0 & 0 & 0 & r_2 \\ r_2 & 0 & 0 & 0 \\ 0 & r_2 & 0 & 0 \\ \end{pmatrix}$}
{$J_7=J_6^{-1}J_1^{-1}P =N^{-1}\omega J_1 J_1^{-1}P=N^{-1}\omega P = \begin{pmatrix} & & & & r_2 & & & \\ & & & & & -r_2 & & \\ & & & & & & -r_2 & \\ & & & & & & & r_2 \\ -r_2 & & & & & & & \\ & r_2 & & & & & & \\ & & r_2 & & & & & \\ & & & -r_2 & & & & \\ \end{pmatrix}$}
{$J_8=J_7^{-1}Q = \begin{pmatrix} & & & & ir_2 & & & \\ & & & & & -ir_2 & & \\ & & & & & & -ir_2 & \\ & & & & & & & ir_2 \\ -ir_2 & & & & & & & \\ & ir_2 & & & & & & \\ & & ir_2 & & & & & \\ & & & -ir_2 & & & & \\ \end{pmatrix}$}
A concrete set of anticommuting linear complex structures {$J_1, J_2, J_3, J_4, J_5, J_6, J_7,\cdots$}
{$J_1=\textrm{diag}[i_2]=\textrm{diag}[i_4]$}
{$J_2=\textrm{diag}[j_4]$}
{$K_8=\begin{pmatrix} I_4 & 0 \\ 0 & -I_4 \\ \end{pmatrix}$}
{$m_{3_8}= \begin{pmatrix} -k_4 & 0 \\ 0 & k_4 \\ \end{pmatrix}$}
{$J_3=\textrm{diag}[m_{3_8}]$}
{$L=\begin{pmatrix} 0 & I_4 \\ -I_4 & 0 \\ \end{pmatrix}$}
{$m_{4_8}= \begin{pmatrix} 0 & k_4 \\ k_4 & 0 \\ \end{pmatrix}$}
{$J_4=\textrm{diag}[m_{4_8}]$}
{$M_4=\begin{pmatrix} I_2 & 0 \\ 0 & -I_2 \\ \end{pmatrix}$}
{$M_8=\begin{pmatrix} -M_4 & 0 \\ 0 & M_4 \\ \end{pmatrix} = \begin{pmatrix} -I_2 & 0 & 0 & 0 \\ 0 & I_2 & 0 & 0 \\ 0 & 0 & I_2 & 0 \\ 0 & 0 & 0 & -I_2 \\ \end{pmatrix}$}
{$m_{5_8}= \begin{pmatrix} 0 & 0 & 0 & -r_2 \\ 0 & 0 & -r_2 & 0 \\ 0 & r_2 & 0 & 0 \\ r_2 & 0 & 0 & 0 \\ \end{pmatrix} = \begin{pmatrix} & & & & & & -1 & \\ & & & & & & & 1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ & & 1 & & & & & \\ & & & -1 & & & & \\ 1 & & & & & & & \\ & -1 & & & & & & \\ \end{pmatrix}$}
{$J_5=\textrm{diag}[m_{5_8}]$}
{$N_4=\begin{pmatrix} r_2 & 0 \\ 0 & r_2 \\ \end{pmatrix}$}
{$N_8=\begin{pmatrix} N_4 & 0 \\ 0 & -N_4 \\ \end{pmatrix} = \begin{pmatrix} r_2 & 0 & 0 & 0 \\ 0 & r_2 & 0 & 0 \\ 0 & 0 & -r_2 & 0 \\ 0 & 0 & 0 & -r_2 \\ \end{pmatrix} = \begin{pmatrix} 1 & & & & & & & \\ & -1 & & & & & & \\ & & 1 & & & & & \\ & & & -1 & & & & \\ & & & & -1 & & & \\ & & & & & 1 & & \\ & & & & & & -1 & \\ & & & & & & & 1 \\ \end{pmatrix}$}
{$m_{6_8}= \begin{pmatrix} 0 & 0 & i_2r_2 & 0 \\ 0 & 0 & 0 & i_2r_2 \\ -i_2r_2 & 0 & 0 & 0 \\ 0 & -i_2r_2 & 0 & 0 \\ \end{pmatrix} = \begin{pmatrix} & & & & & 1 & & \\ & & & & 1 & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & -1 & & & & & & \\ -1 & & & & & & & \\ & & & -1 & & & & \\ & & -1 & & & & & \\ \end{pmatrix}$}
{$J_6=\textrm{diag}[m_{6_8}]$}
{$r_4=\begin{pmatrix} r_2 & 0 \\ 0 & r_2 \\ \end{pmatrix}$}
{$P_{8*}= \begin{pmatrix} r_4 & 0 & 0 & 0 \\ 0 & -r_4 & 0 & 0 \\ 0 & 0 & r_4 & 0 \\ 0 & 0 & 0 & -r_4 \\ \end{pmatrix} = \begin{pmatrix} 1 & & & & & & & & & & & & & & & \\ & -1 & & & & & & & & & & & & & & \\ & & 1 & & & & & & & & & & & & & \\ & & & -1 & & & & & & & & & & & & \\ & & & & -1 & & & & & & & & & & & \\ & & & & & 1 & & & & & & & & & & \\ & & & & & & -1 & & & & & & & & & \\ & & & & & & & 1 & & & & & & & & \\ & & & & & & & & 1 & & & & & & & \\ & & & & & & & & & -1 & & & & & & \\ & & & & & & & & & & 1 & & & & & \\ & & & & & & & & & & & -1 & & & & \\ & & & & & & & & & & & & -1 & & & \\ & & & & & & & & & & & & & 1 & & \\ & & & & & & & & & & & & & & -1 & \\ & & & & & & & & & & & & & & & 1 \\ \end{pmatrix}$}
{$s_4=\begin{pmatrix} r_2 & 0 \\ 0 & -r_2 \\ \end{pmatrix}$}
{$s_8=\begin{pmatrix} s_4 & 0 \\ 0 & -s_4 \\ \end{pmatrix}$}
{$J_7=\begin{pmatrix} 0 & s_8 \\ -s_8 & 0 \\ \end{pmatrix} = \begin{pmatrix} & & & & & & & & 1 & & & & & & & \\ & & & & & & & & & -1 & & & & & & \\ & & & & & & & & & & -1 & & & & & \\ & & & & & & & & & & & 1 & & & & \\ & & & & & & & & & & & & -1 & & & \\ & & & & & & & & & & & & & 1 & & \\ & & & & & & & & & & & & & & 1 & \\ & & & & & & & & & & & & & & & -1 \\ -1 & & & & & & & & & & & & & & & \\ & 1 & & & & & & & & & & & & & & \\ & & 1 & & & & & & & & & & & & & \\ & & & -1 & & & & & & & & & & & & \\ & & & & 1 & & & & & & & & & & & \\ & & & & & -1 & & & & & & & & & & \\ & & & & & & -1 & & & & & & & & & \\ & & & & & & & 1 & & & & & & & & \\ \end{pmatrix}$}
{$Q_{8*}= \begin{pmatrix} J_{1_4} & 0 & 0 & 0 \\ 0 & J_{1_4} & 0 & 0 \\ 0 & 0 & J_{1_4} & 0 \\ 0 & 0 & 0 & J_{1_4} \\ \end{pmatrix} = \begin{pmatrix} & -1 & & & & & & & & & & & & & & \\ 1 & & & & & & & & & & & & & & & \\ & & & -1 & & & & & & & & & & & & \\ & & 1 & & & & & & & & & & & & & \\ & & & & & -1 & & & & & & & & & & \\ & & & & 1 & & & & & & & & & & & \\ & & & & & & & -1 & & & & & & & & \\ & & & & & & 1 & & & & & & & & & \\ & & & & & & & & & -1 & & & & & & \\ & & & & & & & & 1 & & & & & & & \\ & & & & & & & & & & & -1 & & & & \\ & & & & & & & & & & 1 & & & & & \\ & & & & & & & & & & & & & -1 & & \\ & & & & & & & & & & & & 1 & & & \\ & & & & & & & & & & & & & & & -1 \\ & & & & & & & & & & & & & & 1 & \\ \end{pmatrix}$}
{$c_4= \begin{pmatrix} 0 & 1 & 0 & 0 \\ 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & -1 \\ 0 & 0 & -1 & 0 \\ \end{pmatrix}$}
{$J_8= \begin{pmatrix} 0 & 0 & c_4 & 0 \\ 0 & 0 & 0 & -c_4 \\ -c_4 & 0 & 0 & 0 \\ 0 & c_4 & 0 & 0 \\ \end{pmatrix} = \begin{pmatrix} & & & & & & & & & 1 & & & & & & \\ & & & & & & & & 1 & & & & & & & \\ & & & & & & & & & & & -1 & & & & \\ & & & & & & & & & & -1 & & & & & \\ & & & & & & & & & & & & & -1 & & \\ & & & & & & & & & & & & -1 & & & \\ & & & & & & & & & & & & & & & 1 \\ & & & & & & & & & & & & & & 1 & \\ & -1 & & & & & & & & & & & & & & \\ -1 & & & & & & & & & & & & & & & \\ & & & 1 & & & & & & & & & & & & \\ & & 1 & & & & & & & & & & & & & \\ & & & & & 1 & & & & & & & & & & \\ & & & & 1 & & & & & & & & & & & \\ & & & & & & & -1 & & & & & & & & \\ & & & & & & -1 & & & & & & & & & \\ \end{pmatrix}$}
{$\mathbb{C}$}
| {$I=1$} | {$J_1=i$} |
| {$\begin{pmatrix} 1 & \\ & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 \\ 1 & \\ \end{pmatrix}$} |
{$\mathbb{H}$}
| {$I=1$} | {$J_1=i$} | {$J_2=j$} | {$J_1J_2=ij$} |
| {$\begin{pmatrix} 1 & & & \\ & 1 & & \\ & & 1 & \\ & & & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 & & \\ 1 & & & \\ & & & -1 \\ & & 1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & \\ & & & -1 \\-1 & & & \\ & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & & 1 \\ & & 1 & \\ & -1 & & \\ -1 & & & \\ \end{pmatrix}$} |
{$\mathbb{H}\oplus\mathbb{H}$}
| {$\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 & & & & & & \\ 1 & & & & & & & \\ & & & -1 & & & & \\ & & 1 & & & & & \\ & & & & & -1 & & \\ & & & & 1 & & & \\ & & & & & & & -1 \\ & & & & & & 1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & & & -1 & & & & \\ -1 & & & & & & & \\ & 1 & & & & & & \\ & & & & & & 1 & \\ & & & & & & & -1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & & -1 & & & & \\ & & -1 & & & & & \\ & 1 & & & & & & \\ 1 & & & & & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ \end{pmatrix}$} |
| {$I=1$} | {$J_1=i$} | {$J_2=j$} | {$J_3=J_2^{-1}J_1^{-1}K$} |
| {$\begin{pmatrix} 1 & \\ & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} i & \\ & i \\ \end{pmatrix}$} | {$\begin{pmatrix} j & \\ & j \\ \end{pmatrix}$} | {$\begin{pmatrix} -k & \\ & k \\ \end{pmatrix}$} |
| {$\begin{pmatrix} & & & 1 & & & & \\ & & 1 & & & & & \\ & -1 & & & & & & \\ -1 & & & & & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & & & -1 & & & & \\ -1 & & & & & & & \\ & 1 & & & & & & \\ & & & & & & 1 & \\ & & & & & & & -1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & -1 & & & & & & \\ & & & & 1 & & & \\ & & & -1 & & & & \\ & & & & & 1 & & \\ & & & & -1 & & & \\ & & & & & & & 1 \\ & & & & & & -1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & -1 & & \\ & & & & & & -1 & \\ & & & & & & & -1 \\ \end{pmatrix}$} |
| {$J_1J_2$} | {$J_1J_3=J_2K$} | {$J_2J_3=-J_1K$} | pseudoscalar {$J_1J_2J_3=K$} |
| {$\begin{pmatrix} k & \\ & k \\ \end{pmatrix}$} | {$\begin{pmatrix} j & \\ & -j \\ \end{pmatrix}$} | {$\begin{pmatrix} -i & \\ & i \\ \end{pmatrix}$} | {$\begin{pmatrix} 1 & \\ & -1 \\ \end{pmatrix}$} |
Alternative
We can double the dimensions initially so that we can then split them in half when we construct {$K$} and {$J_3$}. We have:
{$J_1$} as blocks of {$\begin{pmatrix} 0 & -I_2 \\ I_2 & 0 \\ \end{pmatrix}$}
{$J_2$} as {$\begin{pmatrix} 0 & 0 & I_2 & 0 \\ 0 & 0 & 0 & -I_2 \\ -I_2 & 0 & 0 & 0 \\ 0 & I_2 & 0 & 0 \\ \end{pmatrix}$}
{$K=\begin{pmatrix} -r_2 & 0 & 0 & 0 \\ 0 & -r_2 & 0 & 0 \\ 0 & 0 & -r_2 & 0 \\ 0 & 0 & 0 & -r_2 \\ \end{pmatrix}$}
{$J_3=\begin{pmatrix} 0 & 0 & 0 & r_2 \\ 0 & 0 & r_2 & 0 \\ 0 & -r_2 & 0 & 0 \\ -r_2 & 0 & 0 & 0 \\ \end{pmatrix}$} but this is {$-J_5} above.
Commuting with orthogonal matrices
A skew-symmetric matrix {$A$} is one such that {$A^{T}=-A$}. This is true of the orthogonal matrices {$J_i$} for which {$J_i^2=-1$}, for we have {$J_iJ_i^T=1$}, thus {$J_i^T=J_i^{-1}=-J_i$}.
Symplectic matrices {$M$} are those for which {$M^T\Omega M=\Omega$} where {$\Omega$} is a nondegenerate skew-symmetric bilinear form which we can take to be {$\Omega = J_i$}.
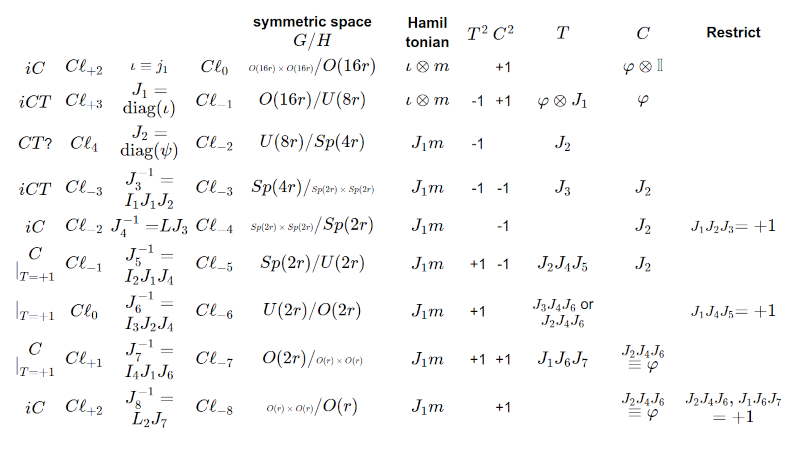
The subgroup of {$O(16r)$} that commutes with {$J_1$} is a subgroup of {$Sp(16r,\mathbb{R})$} and is given by {$U(8r)=O(16r)\cap Sp(16r,\mathbb{R})$}.
The subgroup of {$U(8r)$} that commutes with {$J_2$} is a subgroup of {$Sp(8r,\mathbb{C})$} and is given by {$Sp(4r)=U(8r)\cap Sp(8r,\mathbb{C})$} and this is isomorphic to the quaternionic unitary group {$U(4r,\mathbb{H})$}.
Observations
Where operators square to I, and have eigenspaces {$V_+$} and {$V_-$} of equal dimension, then these can be thought of as geodesics and also as points in the Grassmannian {$Gr_\mathbb{R}(n,2n)$}
The foursome (knowledge) is the mirror {$L$}. Knowledge evokes (just as memory does). This mirror acts by sending what is explicitly manifest (expressed symbols) to what is missing (implicit, virtual symbols - the holes of symbols) and vice versa. It is the Hackett-Kauffman sphere for the belt trick.
Ideas
- {$J_7$} yields for the sevensome a splitting of the atomic space into two parallel spaces, one of truth which keeps the eigenvector fixed, and one of falsehood which negates it. And then {$J_8$} identifies these two parallel spaces, negating them.
- {$Cl_{0,6}\cong R(8)$} models 6 perspectives, the most we can introspect, and to go beyond that we would need larger matrices and we can't.
Linear complex structures
- {$J_1$} is taken to be the block diagonal matrix with {$2\times 2$} blocks {$b_1$}. It defines what is unitary.
- {$J_2$} is taken to be the block diagonal matrix with {$4\times 4$} blocks {$b_2$}. It further defines what is symplectic.
- {$J_3$}
- {$J_4$}
- {$J_5$}
- {$J_6$}
- {$J_7$}
- {$J_8$}