
- MathNotebook
- MathConcepts
- StudyMath
- Geometry
- Logic
- Bott periodicity
- CategoryTheory
- FieldWithOneElement
- MathDiscovery
- Math Connections
Epistemology
- m a t h 4 w i s d o m - g m a i l
- +370 607 27 665
- My work is in the Public Domain for all to share freely.
- 读物 书 影片 维基百科
Introduction E9F5FC
Questions FFFFC0
Software
Bott periodicity, Sets of Linear Complex Structures, Artificial General Intelligence Presentation, Hamiltonians
2025.03.03 Andrius Kulikauskas. Math4Wisdom.com
Metaphysics of Bott Periodicity for Octonion Maniacs
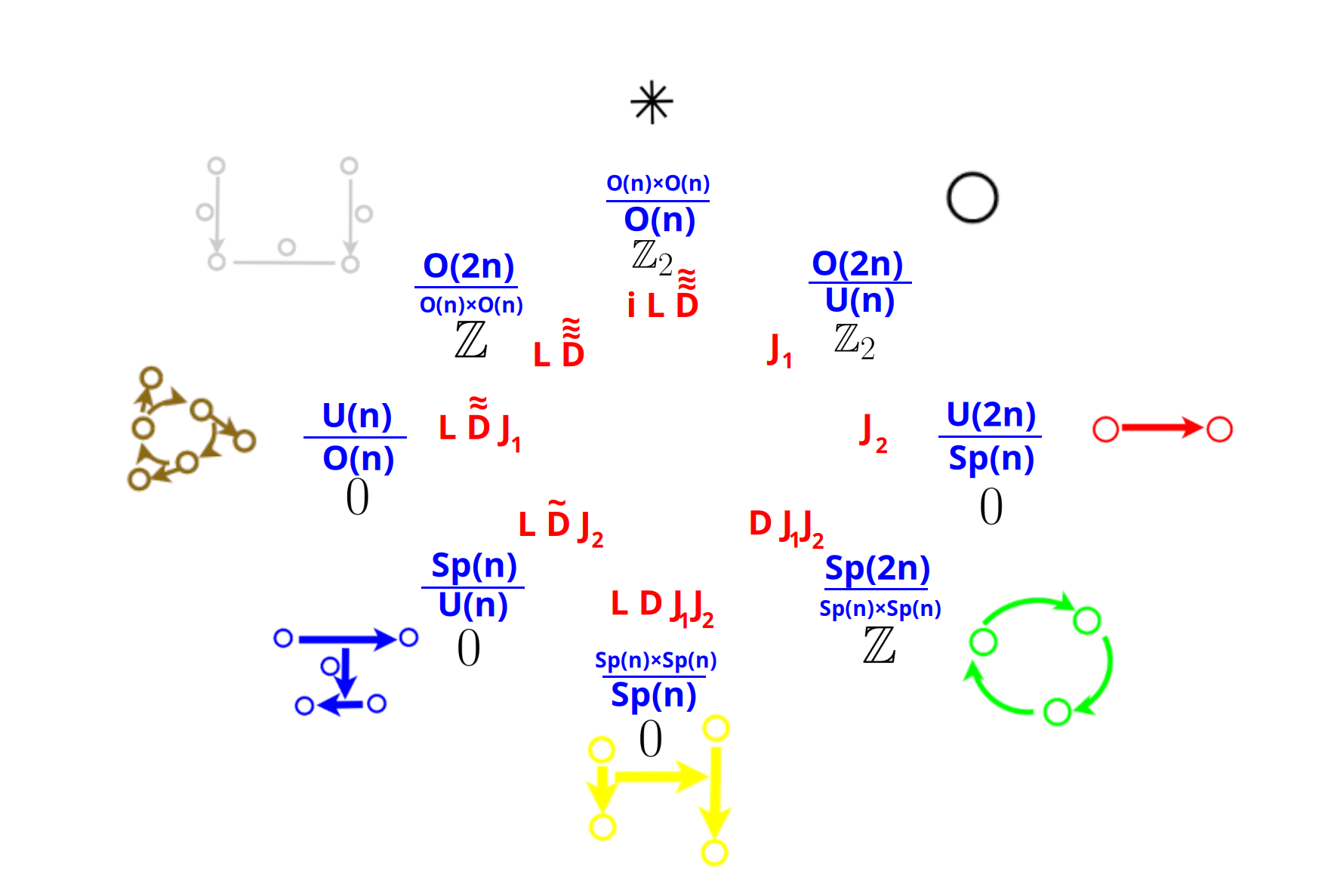
| Metaphysics | Mathematics |
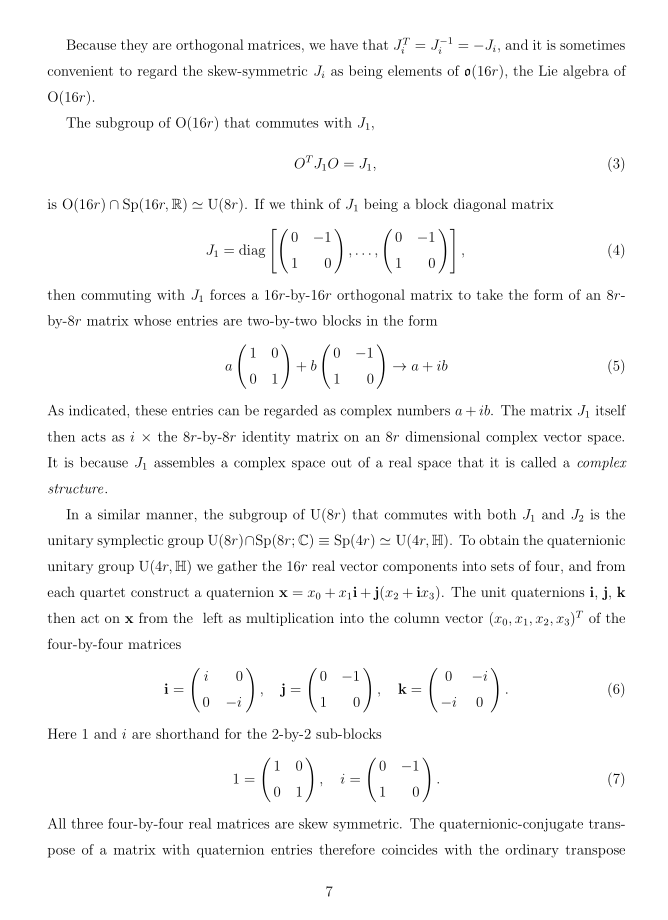
| everything | orthogonal group {$O(16r)$} |
| perspective | linear complex structure {$J_\alpha$} |
| division of everything | set of mutually anticommuting {$J_1,J_2,J_3,\dots$} |
| shift in perspective | isometry {$L=J_\alpha J_\beta$} (of different sizes?) |
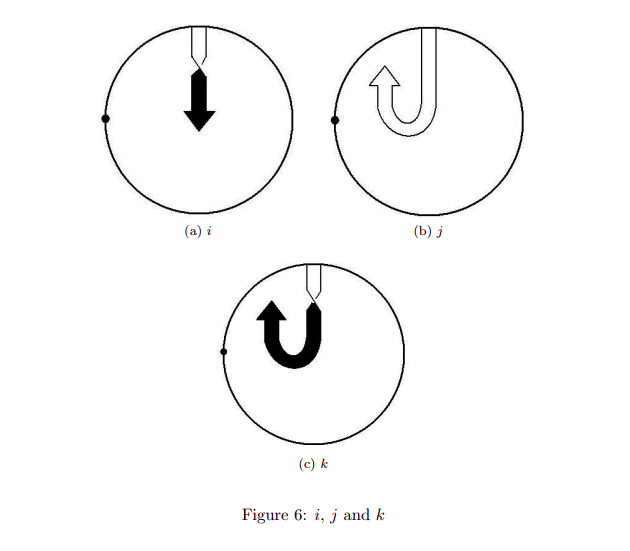
| three-cycle | quaternions {$i, j, k$} but in both directions thanks to {$D$} |
| foursome | isometry {$LD$} maps {$J_1J_2$} from one space to another |
| higher divisions | ręmove {$J_1, J_2, J_1J_2$} from the total {$LDJ_1J_2$} |
| collapse of everything | second isometry {$Q$} |
2017. Andrius Kulikauskas. Time and Space as Representations of Decision-Making.
John Baez. The Octonions. Projective lines.
Given a vector space {$V$} over a field {$K$}. The projective space {$P(V)$} is the set of equivalence classes of {$x\in V, x\neq 0$} defined by {$x\sim y$} if there exists {$λ\in K$} such that {$x = λy$}.
A projective line is a one-dimensional projective space. All of the points lie on a single line. The line includes a point at infinity.`
| {$\mathbb{RP}^1\cong S^1$} {$\mathbb{CP}^1\cong S^2$} {$\mathbb{HP}^1\cong S^4$} {$\mathbb{OP}^1\cong S^8$} | {$f_\mathbb{R}:S^0\to O(1)$} {$f_\mathbb{C}:S^1\to O(2)$} {$f_\mathbb{H}:S^3\to O(4)$} {$f_\mathbb{O}:S^7\to O(8)$} | {$[f_\mathbb{R}]$} generates {$\pi_0(O(\infty)) \cong \mathbb{Z}_2$} {$[f_\mathbb{C}]$} generates {$\pi_1(O(\infty)) \cong \mathbb{Z}_2$} {$[f_\mathbb{H}]$} generates {$\pi_3(O(\infty)) \cong \mathbb{Z}$} {$[f_\mathbb{O}]$} generates {$\pi_7(O(\infty)) \cong \mathbb{Z}$} | {$S^0\hookrightarrow S^1\hookrightarrow S^1$} {$S^1\hookrightarrow S^3\hookrightarrow S^2$} {$S^3\hookrightarrow S^7\hookrightarrow S^4$} {$S^7\hookrightarrow S^{15}\hookrightarrow S^8$} |
John Baez. The Octonions. {$\mathbb{OP}^1$} and Bott Periodicity.
Real vector bundle {$E$} over {$S^n$} defines an equivalence class {$[E]\in KO(S^n)$} generating an additive monoid that yields the Grothendieck group {$KO(S^n)$}. Fixing a point in {$S^n$} and modding out by the dimension of the fiber of {$E$} at that point yields the reduced theory {$\widetilde{KO}(S^n)$}.
Reduced real K-theory of spheres
| {$\widetilde{KO}(S^1)$} | {$\widetilde{KO}(S^2)$} | {$\widetilde{KO}(S^3)$} | {$\widetilde{KO}(S^4)$} | {$\widetilde{KO}(S^5)$} | {$\widetilde{KO}(S^6)$} | {$\widetilde{KO}(S^7)$} | {$\widetilde{KO}(S^8)$} |
| {$\mathbb{Z}_2$} | {$\mathbb{Z}_2$} | {$0$} | {$\mathbb{Z}$} | {$0$} | {$0$} | {$0$} | {$\mathbb{Z}$} |
Projective lines
- {$[L_\mathbb{R}]$} generates {$\widetilde{KO}(S^1)\cong \mathbb{Z}_2$}
- {$[L_\mathbb{C}]$} generates {$\widetilde{KO}(S^2)\cong \mathbb{Z}_2$}
- {$[L_\mathbb{H}]$} generates {$\widetilde{KO}(S^4)\cong \mathbb{Z}$}
- {$[L_\mathbb{O}]$} generates {$\widetilde{KO}(S^8)\cong \mathbb{Z}$}
There is a graded ring {$KO$} given by {$KO_n=\widetilde{KO}(S^n)$} and the smash product of spheres.
Multiplying by {$[L_\mathbb{O}]$} gives the isomorphism {$\widetilde{KO}(S^n)\to\widetilde{KO}(S^n)$} defined by {$x\mapsto [L_\mathbb{O}]x$}.
J.-H.Eschenburg. Geometry of Octonions
Standard basis {$B_\mathbb{O} = \{1, i, j, k, l, il, jl, kl\}$}
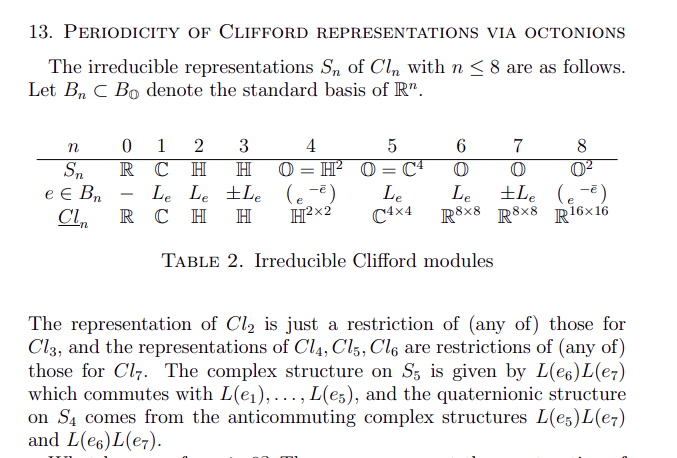
Periodicity Theorem for Clifford modules: {$M_{n+8}=M_n\otimes \mathbb{O}^2$}
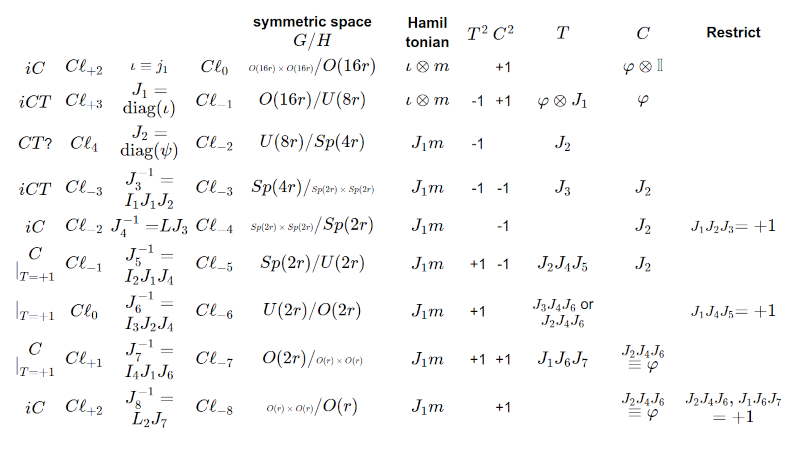
{$O(16)\supset U(8)\supset Sp(4)\supset Sp(2)\times Sp(2)\supset Sp(2)\supset U(2)\supset O(2)\supset O(1)\times O(1)\supset O(1)$}
 |  |  |
Define {$J_1, J_2, J_3, J_4, J_5, J_6, J_7, J_8, \dots$}
- that are orthogonal matrices {$J_\alpha J_\alpha^T=I$}
- that are independent generators
- such that {$J_\alpha^2=-1$} (thus {$J_\alpha^{T}=J_\alpha^{-1}=-J_\alpha$} and so {$J_\alpha$} are skew-symmetric)
- {$J_\alpha J_\beta = -J_\beta J_\alpha$} when {$\alpha\neq\beta$}.
{$(J_1 J_2)(J_1 J_2)=-1$}
{$(J_1 J_2 J_3)(J_1 J_2 J_3)=1$} Thus the operator {$J_1J_2J_3$} satisfies {$x^2–1=0$} and its eigenvalues are in {$\{1,-1\}$}.
{$K=\begin{pmatrix} I_4 & \\ & -I_4 \\ \end{pmatrix}$}, {$L=J_3J_4=\begin{pmatrix} & I_4 \\ -I_4 & \\ \end{pmatrix}$}, {$KL=\begin{pmatrix} & I_4 \\ I_4 & \\ \end{pmatrix}$},
{$K=J_1J_2J_3=\textrm{diag}[1,1,1,1,-1,-1,-1,-1]$} (I fixed an error! I got the sign wrong.)
{$M=J_1J_4J_5=\textrm{diag}[-1,-1,1,1,1,1,-1,-1]$} (I fixed an error! I got the sign wrong.)
{$N=J_2J_4J_6=\textrm{diag}[1,-1,1,-1,-1,1,-1,1]$}
{$P=J_1J_6J_7=\textrm{diag}[1,1,-1,-1,1,1,-1,-1,-1,-1,1,1,-1,-1,1,1]$} (I fixed this)
{$Q=J_7J_8$} is an isometry, thus on the off diagonal
They provide a recipe for constructing mutually anticommuting linear complex structures {$J_1, J_2, J_3, J_4, J_5, J_6, J_7,\cdots$}.
{$J_1=\textrm{diag}[\hat{i}]$}
{$J_2=\textrm{diag}[j_4]$}
Suppose {$J_3$} exists. Let {$K=J_1J_2J_3$}. Then {$K^2=I$} and consequently, {$K$} satisfies {$x^2-1$}, thus posseses quaternionic eigenspaces {$V_{\pm}$} where it takes values {$\pm 1$} accordingly. {$Kv_+=v_+$} for {$v_+\in V_+$} and {$Kv_-=-v_-$} for {$v_-\in V_-$}. {$K$} can be used to define {$J_3=J_2^{-1}J_1^{-1}K$}.
To define {$J_4$} we must suppose {$V_+$} and {$V_-$} have the same dimension. Suppose {$J_4$} exists. Let {$L=J_3J_4$}. Then {$LK=-KL, L^2=-I, LJ_1=J_1L, LJ_2=J_2L$}. {$L$} preserves the quaternionic structure and is a quaternionic isometry from {$V_+$} to {$V_-$}. {$L$} can be used to define {$J_4=J_3^{-1}L$}.
Suppose {$J_5$} exists. Let {$M=J_1J_4J_5$}. Then {$M^2=I$} and {$M$} commutes with {$K$} and {$J_1$}. Thus {$M$} acts within an eigenspace of {$K$} (say {$V_+$}) and divides it into two mutually orthogonal eigenspaces {$W_\pm$} with {$W_-=J_2W_+$}. {$M$} can be used to define {$J_5=J_4^{-1}J_1^{-1}M$}.
Suppose {$J_6$} exists. Let {$N=J_2J_4J_6$}. Then {$N^2=I$} and {$N$} commutes with {$K$} and {$M$}. Thus {$N$} acts within an eigenspace of {$M$} (say {$W_+$}) and divides it into two mutually orthogonal eigenspaces {$X_\pm$} with {$X_-=J_1W_+$}. {$N$} can be used to define {$J_6=J_4^{-1}J_2^{-1}N$}.
Suppose {$J_7$} exists. Let {$P=J_1J_6J_7$}. Then {$P^2=I$} and {$P$} commutes with {$K$}, {$M$} and {$N$}. Thus {$P$} acts within an eigenspace of {$X$} (say {$X_+$}) and divides it into two mutually orthogonal eigenspaces {$Y_\pm$}. {$P$} can be used to define {$J_7=J_6^{-1}J_1^{-1}P$}.
To define {$J_8$} we must suppose {$Y_+$} and {$Y_-$} have the same dimension. Suppose {$J_8$} exists. Let {$Q=J_7J_8$}. Then {$Q^2=-I$} and {$Q$} commutes with {$K$}, {$M$} and {$N$} but anticommutes with {$P$}. Thus {$Q$} is an isometry mapping {$Y_+\leftrightarrow Y_-$}. {$Q$} can be used to define {$J_8=J_7^{-1}Q$}.
| {$J_1= \begin{pmatrix} & -1 & & & & & & \\ 1 & & & & & & & \\ & & & -1 & & & & \\ & & 1 & & & & & \\ & & & & & -1 & & \\ & & & & 1 & & & \\ & & & & & & & -1 \\ & & & & & & 1 & \\ \end{pmatrix}$} | {$J_2= \begin{pmatrix} & & 1 & & & & & \\ & & & -1 & & & & \\-1 & & & & & & & \\ & 1 & & & & & & \\ & & & & & & 1 & \\ & & & & & & & -1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ \end{pmatrix}$} | {$J_3= \begin{pmatrix} & & & -1 & & & & \\ & & -1 & & & & & \\ & 1 & & & & & & \\ 1 & & & & & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ \end{pmatrix}$} |
| {$J_1$} yields {$\mathbb{C}$} | adding {$J_2$} yields {$\mathbb{H}$} | adding {$J_3$} yields {$\mathbb{H}\oplus\mathbb{H}$} |
| {$J_4= \begin{pmatrix} & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ & & & 1 & & & & \\ & & 1 & & & & & \\ & -1 & & & & & & \\ -1 & & & & & & & \\ \end{pmatrix}$} | {$J_5= \begin{pmatrix} & & & & & & -1 & \\ & & & & & & & 1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ & & 1 & & & & & \\ & & & -1 & & & & \\ 1 & & & & & & & \\ & -1 & & & & & & \\ \end{pmatrix}$} | {$J_6= \begin{pmatrix} & & & & & 1 & & \\ & & & & 1 & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & -1 & & & & & & \\-1 & & & & & & & \\ & & & -1 & & & & \\ & & -1 & & & & & \\ \end{pmatrix}$} |
| adding {$J_4$} yields {$M_2(\mathbb{H})$} | adding {$J_5$} yields {$M_4(\mathbb{C})$} | adding {$J_6$} yields {$M_8(\mathbb{R})$} |
| {$J_7= \begin{pmatrix} & & \hat{r} & & & & & \\ & & & -\hat{r} & & & & \\ -\hat{r} & & & & & & & \\ & \hat{r} & & & & & & \\ & & & & & & -\hat{r} & \\ & & & & & & & \hat{r} \\ & & & & \hat{r} & & & \\ & & & & & -\hat{r} & & \\ \end{pmatrix}$} | {$J_8= \begin{pmatrix} & & & & & & -\hat{r} & \\ & & & & & & & \hat{r} \\ & & & & \hat{r} & & & \\ & & & & & -\hat{r} & & \\ & & -\hat{r} & & & & & \\ & & & \hat{r} & & & & \\ \hat{r} & & & & & & & \\ & -\hat{r} & & & & & & \\ \end{pmatrix}$} | {$\hat{r}=\begin{pmatrix} 1 & \\ & -1 \\ \end{pmatrix}$} |
| adding {$J_7$} yields {$M_8(\mathbb{R})\oplus M_8(\mathbb{R})$} | adding {$J_8$} yields {$M_{16}(\mathbb{R})$} |
Note: I have corrected {$J_7$} and {$J_8$} above.
 |  |  |  |
{$J_4=KLJ_1J_2$} where {$K=J_1J_2J_3=\textrm{diag} \begin{bmatrix} 1 & 1 & 1 & 1 & -1 & -1 & -1 & -1 \\ \end{bmatrix}$} is diagonal (I fixed an error)
{$J_5=LJ_2\;\textrm{diag} \begin{bmatrix} 1 & 1 & -1 & -1 & 1 & 1 & -1 & -1 \\ \end{bmatrix}$}
{$J_6=LJ_1\;\textrm{diag} \begin{bmatrix} 1 & -1 & 1 & -1 & 1 & -1 & 1 & -1 \\ \end{bmatrix}$}
{$J_7=L\;\textrm{diag} \begin{bmatrix} 1 & -1 & -1 & 1 & 1 & -1 & -1 & 1 & -1 & 1 & 1 & -1 & -1 & 1 & 1 & -1 \\ \end{bmatrix}$}
Notation
{$R_2= \begin{pmatrix} 1 & \\ & -1 \end{pmatrix}, R_4= \begin{pmatrix} 1 & & & \\ & 1 & & \\ & & -1 & \\ & & & -1 \\ \end{pmatrix}, R_8=\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & -1 & & \\ & & & & & & -1 & \\ & & & & & & & -1 \\ \end{pmatrix}$}
The reflections {$R_2, R_4, R_8$} determine eigenspaces {$V_{+1}$} and {$V_{-1}$}.
A shift in perspective is given by an isometry between eigenspaces {$V_{+1}$} and {$V_{-1}$}.
{$L_2= \begin{pmatrix} & -1 \\ 1 & \end{pmatrix}, L_4= \begin{pmatrix} & & -1 & \\ & & & -1 \\ 1 & & & \\ & 1 & & \\ \end{pmatrix}, L_8=\begin{pmatrix} & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ -1 & & & & & & & \\ & -1 & & & & & & \\ & & -1 & & & & & \\ & & & -1 & & & & \\ \end{pmatrix}$}
Note that
{$\begin{pmatrix} & -1 & & \\ 1 & & & \\ & & & -1 \\ & & 1 & \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & & -1 \\ & & 1 & \\ & 1 & & \\ -1 & & & \\ \end{pmatrix}$}
{$\begin{pmatrix} 1 & & & \\ & -1 & & \\ & & 1 & \\ & & & -1 \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & 1 & \\ & & & -1 \\ -1 & & & \\ & 1 & & \\ \end{pmatrix} = j = J_2$}
{$\begin{pmatrix} & 1 & & \\ 1 & & & \\ & & & 1 \\ & & 1 & \\ \end{pmatrix} \begin{pmatrix} & & 1 & \\ & & & 1 \\ -1 & & & \\ & -1 & & \\ \end{pmatrix} = \begin{pmatrix} & & & 1 \\ & & 1 & \\ & -1 & & \\ -1 & & & \\ \end{pmatrix} = k$}
Thus the {$2\times 2$} matrices {$M_l$} are mapped by {$L_4$} to an isometry that involves multiplying by {$M_l$} in one direction and {$-M_l$} in the opposite direction.
{$\mathbb{C}$}
| {$I=1$} | {$J_1=i$} |
| {$\begin{pmatrix} 1 & \\ & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 \\ 1 & \\ \end{pmatrix}$} |
{$\mathbb{H}$}
| {$I=1$} | {$J_1=i$} | {$J_2=j$} | {$J_1J_2=ij$} |
| {$\begin{pmatrix} 1 & & & \\ & 1 & & \\ & & 1 & \\ & & & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 & & \\ 1 & & & \\ & & & -1 \\ & & 1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & \\ & & & -1 \\-1 & & & \\ & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & & 1 \\ & & 1 & \\ & -1 & & \\ -1 & & & \\ \end{pmatrix}$} |
{$\mathbb{H}\oplus\mathbb{H}$}
| {$\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & 1 & & & \\ & & & & & 1 & & \\ & & & & & & 1 & \\ & & & & & & & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} & -1 & & & & & & \\ 1 & & & & & & & \\ & & & -1 & & & & \\ & & 1 & & & & & \\ & & & & & -1 & & \\ & & & & 1 & & & \\ & & & & & & & -1 \\ & & & & & & 1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & & & -1 & & & & \\ -1 & & & & & & & \\ & 1 & & & & & & \\ & & & & & & 1 & \\ & & & & & & & -1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & & -1 & & & & \\ & & -1 & & & & & \\ & 1 & & & & & & \\ 1 & & & & & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ \end{pmatrix}$} |
| {$I=1$} | {$J_1=i$} | {$J_2=j$} | {$J_3=J_2^{-1}J_1^{-1}K$} |
| {$\begin{pmatrix} 1 & \\ & 1 \\ \end{pmatrix}$} | {$\begin{pmatrix} i & \\ & i \\ \end{pmatrix}$} | {$\begin{pmatrix} j & \\ & j \\ \end{pmatrix}$} | {$\begin{pmatrix} -k & \\ & k \\ \end{pmatrix}$} |
| {$\begin{pmatrix} & & & 1 & & & & \\ & & 1 & & & & & \\ & -1 & & & & & & \\ -1 & & & & & & & \\ & & & & & & & 1 \\ & & & & & & 1 & \\ & & & & & -1 & & \\ & & & & -1 & & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & & & -1 & & & & \\ -1 & & & & & & & \\ & 1 & & & & & & \\ & & & & & & 1 & \\ & & & & & & & -1 \\ & & & & -1 & & & \\ & & & & & 1 & & \\ \end{pmatrix}$} | {$\begin{pmatrix} & & 1 & & & & & \\ & -1 & & & & & & \\ & & & & 1 & & & \\ & & & -1 & & & & \\ & & & & & 1 & & \\ & & & & -1 & & & \\ & & & & & & & 1 \\ & & & & & & -1 & \\ \end{pmatrix}$} | {$\begin{pmatrix} 1 & & & & & & & \\ & 1 & & & & & & \\ & & 1 & & & & & \\ & & & 1 & & & & \\ & & & & -1 & & & \\ & & & & & -1 & & \\ & & & & & & -1 & \\ & & & & & & & -1 \\ \end{pmatrix}$} |
| {$J_1J_2$} | {$J_1J_3=J_2K$} | {$J_2J_3=-J_1K$} | pseudoscalar {$J_1J_2J_3=K$} |
| {$\begin{pmatrix} k & \\ & k \\ \end{pmatrix}$} | {$\begin{pmatrix} j & \\ & -j \\ \end{pmatrix}$} | {$\begin{pmatrix} -i & \\ & i \\ \end{pmatrix}$} | {$\begin{pmatrix} 1 & \\ & -1 \\ \end{pmatrix}$} |
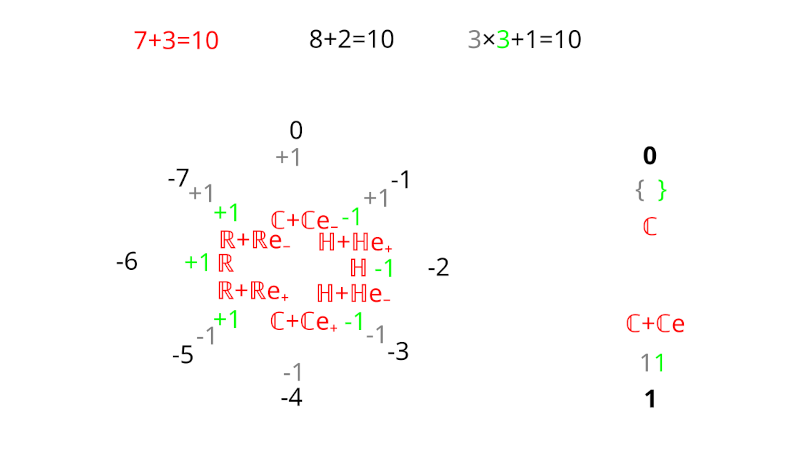
Relate {$L$} in various dimensions with the division super algebras and their markers {$e$}.
Louis Kauffman. From Hamilton's Quaternions to Graves and Cayley's Octonions
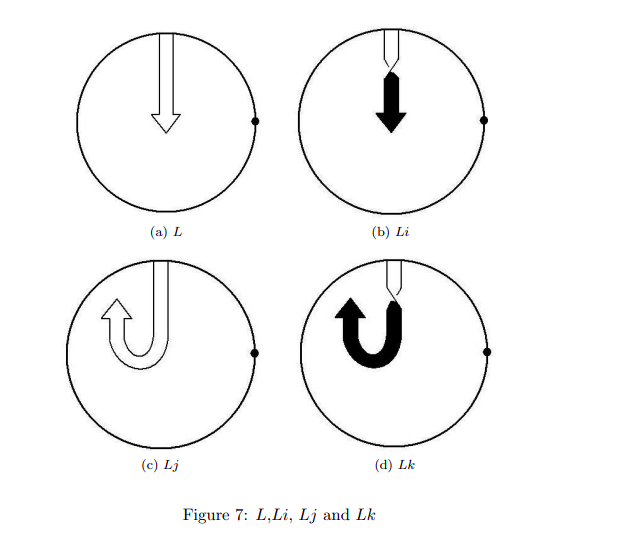
Octonions take us through the Looking Glass {$L$}.
- {$LL=-I$}
- {$La=-aL$}
- {$(La)(Lb)=Lba$}
- {$(La)b=L(ba)$}
- {$a(Lb)=L(ba)$}
This yields nonassociativity (based on the "subtractiveness" of the mirror)
- {$(Lb)a=L(ab)$} but in general {$L(ab)\neq L(ba)$} because of noncommutativity {$ab\neq ba$}
 |  |
Hackett, Kauffman described the belt trick for the octonions where {$L$} plays the role of a context switch or a mirror. They imagine it as a sphere around the belt trick. You can rotate the sphere 180 degrees whereas the quaternions turn at the base.
John Baez. The Octonions. The Fano plane.
The Octonions form seven copies of the quaternions, one for each copy of the circle in the Fano projective plane.
- 3 of the form {$j(Li)=Lk, (Li)(Lk)=j, (Lk)j=Li$} outer edges of triangle
- 3 of the form {$L(jL)=j, (jL)j=L,j(L)=jL$} across the center
- 1 of the form {$ij=k,jk=i,ki=j$} inner circle
- what is missing is a line relating the three corners of the triangle {$Li,Lj,Lk$}. Their product is {$L$}.
Further calculations
Define {$A_i=J_i^{-1}J_{i+1}$}.
- {$A_i^2=-I$} because {$J_i^{-1}J_{i+1}J_i^{-1}J_{i+1}=-1$}
- {$A_i$} is an orthogonal matrix because {$J_i$} and {$J_{i+1}$} are.
- {$A_i$} is a skew-symmetric matrix because it is orthogonal {$A_iA_i^T=I$} and {$AA=-I$} means {$A^T=-A$}.
- {$A_i$} anticommutes with {$J_i$} but commutes with {$J_1,J_2,\dots,J_{i-1}$}.
Then for {$\gamma(t)=J_ie^{A_i\pi t}=J_i\cos \pi t + J_{i+1}\sin \pi t$} we have {$\gamma (0)=J_i, \gamma(\frac{1}{2})=J_{i+1},\gamma{1}=-J_i$} and {$\gamma(t)$} is a geodesic in {$G_{i-1}/G_i$}.
Think of {$A_i$} as a shift in perspective. Note that {$A_3=-J_3J_4$} and {$A_7=-J_6J_7$} are isometries between eigenspaces {$V_+$} and {$V_-$}.
| {$J_1=\textrm{diag}[\begin{pmatrix} & -\hat{I} \\ \hat{I} & \\ \end{pmatrix}]$} | {$A_1=\textrm{diag}[\begin{pmatrix} & & & -\hat{ir} \\ & & -\hat{ir} & \\ & \hat{ir} & & \\ \hat{ir} & & & \\ \end{pmatrix}]$} |
| {$J_2=\textrm{diag}[\begin{pmatrix} & & \hat{I} & \\ & & & -\hat{I} \\ -\hat{I} & & & \\ & \hat{I} & & \\ \end{pmatrix}]$} | {$A_2=\textrm{diag}[\begin{pmatrix} & -\hat{r} \\ \hat{r} & \\ \end{pmatrix},\begin{pmatrix} & -\hat{r} \\ \hat{r} & \\ \end{pmatrix},-\begin{pmatrix} & -\hat{r} \\ \hat{r} & \\ \end{pmatrix},-\begin{pmatrix} & -\hat{r} \\ \hat{r} & \\ \end{pmatrix}]$} |
| {$A_3=\textrm{diag}[\begin{pmatrix} & -\hat{I_8} \\ \hat{I_8} & \\ \end{pmatrix}]$} | |
| {$A_4=\textrm{diag}[\begin{pmatrix} & \hat{ir} \\ -\hat{ir} & \\ \end{pmatrix}]$} | |
| {$A_5=\textrm{diag}[\begin{pmatrix} & & & -\hat{I} \\ & & \hat{I} & \\ & \hat{I} & & \\ -\hat{I} & & & \\ \end{pmatrix}]$} | |
| {$A_6=\textrm{diag}[\begin{pmatrix} & -\hat{r} \\ \hat{r} & \\ \end{pmatrix}]$} | |
| {$A_7=\textrm{diag}[-\hat{i}]$} |